Показати повідомлення
Начинаем обсуждение способов решить проблему управления Углом Опережения Зажигания (УОЗ).
Ушествие Второе. Окончательное.
Змінено: 05.11.2007 р., VadimCrimea
Судя по картинкам, зажигание у нее батарейное, с трехфазным генератором?
Куды нам с однофазным магнето податься? Я вот подумал - если питать магнето не непосредственно от обмотки, а от связанного с ней выпрямителя. Так, чтобы напряжение на конденсаторе было постоянным в течение бОльшей части оборота. Но тогда возможно, надо будет надежно блокировать "паразитные" выбросы при отрицательном фронте.
PS Кстати, иногда встречающиеся посты - "поменял коммутатор, и стал заводиться в обратную сторону", скорее всего связяны именно со срабатыванием коммутатора от этого фронта.
PPS Хотя, эти выбросы, тем у кого они есть, все равно придется блокировать...

Ушествие Второе. Окончательное.
Извините, может не в тему будет сказано. Но надо внести чуть критики со стороны, просто наблюдающей за этим увлекательным делом. Ни в коем случае не хочу никого лично упрекнуть или обидеть. Со стороны создаётся впечатление, что вы хотите повесить на скутер (причём пока не известно какой) некую бомбу, управляющую антидетонацией и поджигом ещё одной взрывающейся смеси. Я как-то тоже мостил на свой Dio эл. зажигание по расчётам для "Верховины", но так это простая вещь. Вы же пытаетесь соорудить сложную штуку, с непонятной целью да и на разные скутера эта вещь будет отличатся. Непойму намерений - долго делать сложный контроллер ради любительского интереса (переростающего в азарт). В любом случае - уважаю вашу затею и желаю удачи. По моему, так для создания МК ОУЗ нет необходимоти включать такую массу параметров, потому что как это просчитать? А для малого количества параметров - результат будет несправедлив, поскольку не оправдает такие эксперименты (стэнды с поглотителями мощности и т.д.) и зависит даже от изменений погодных условий. Как по мне - электронное управление ОУЗ предназначено для улучшение динамических и экономических характеристик скутера, но при постоянных эксплуатационных условиях (без учёта всяких косвенных факторов - дроселей, температур). Исходя из этого это самое управление может быть построено даже на аналоговых элементах для удовлетворения основной цели экономии. Это моё мнение. Может чего-то не разобрал. Можете мне это и объяснить. Лично я увлёкся более практичной вещью - БК для скутеров, которое сейчас и рассчитываю. Потом отчитаюсь (наверняка не скоро). Надо бы идеи воплощать реальные и затребованые. С ув. Евгений.
Всё правильно, зажигание батарейное, генератор трёхфазный, и в схеме видно.
Конденсаторно-тиристорный коммутатор от постоянки работать небудет. А на выпрямительной обмотке наверно напряжение ниже, чем на коммутаторной.
Четыёхтактник в обратную сторону незаведётся.
В принципе, батарейную систему зажигания легче создать, чем подружить СDI с опережением. В качестве ключа я использовал полевой транзистор с логическим управлением. Вот с катушкой посложней, родная некатит, а маленькую надо искать. Хотя на автомобильной работает очень хорошо, но размеры в разы больше.
[url=sdelal.net]http://industrialniy.users.photofile.ru/photo/industrialniy/115116213/135197751.gif
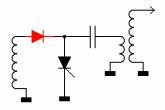
Говоря о выпрямителе я вот что имел в виду: В исходную схему (на рисунке - черным, и не факт, что на всех мопедах именно так) добавить диод (на рисунке - красным). Тогда напряжение на конденсаторе будет равно амплитудному значению напряжения на обмотке уже после первой положительной полуволны (а всего за оборот их две - в силу четырехполюсности магнита), то есть прмерно еще за 180 градусов до момента искрообразования. И останется таким до отпирания тиристора. А после этого, последний запрется как обычно, во время окончания второй положительной полуволны. (с максимумом которой примерно совпадает угол установки датчика)
Ушествие Второе. Окончательное.
Змінено: 21.11.2007 р., Leon
Ну, я вот думаю, что конденсатор в тиристорно-конденсаторной системе зажигания, питающейся от обмотки генератора, успеет зарядится всегда.Так как разряд будет происходить самое большее это за 35 градусов до ВМТ, это не очень много.
А вот насчёт максимума оборотов при правильном угле зажигания на неподвижном мопеде- не получится, хотя я тоже по-началу так думал.
Я пробовал ещё год назад. Завёл скутер, там штатный угол 20 градусов.(можно предположить, что для холостых оборотов этот фиксированный угол явно ранний, нужен около 5-10 град, и здесь вроде бы и должны мы ожидать максимум оборотов)А что реально получилось-Уменьшаю на 5, потом ещё на 5 потом ещё- вижу только , что каждый раз обороты холостого хода слегка уменьшаются, максимума нет.
Теперь повышаю угол- обороты растут,потом вибрация растёт, и так до тех пор, пока его не задёргает и он остановится.
То есть нет максимума на холостом ходу. есть только увеличение оборотов с увеличением угла.
То же самое при езде. с регулятором разгоняется быстрее и ездит динамичнее, но вот на ходу во время езды жму кнопки "+5", "-5" -- стрелка тахометра не меняется, вот только при резких разгонах видно, что при "-5" от того, что стоит там в таблице, рывок быстрее.
На макс оборотах,с поднятым над землёй задним колесом, есть кое-что. Без работы регулятора (20 град) вал крутится 8000, включаю 35 градусов-
стрелка тахометра сначала не движется, потом пододвигается до 10000, иногда до 11.
Я собираюсь на макс оборотах найти то минимальное повышение угла, при котором обороты всё ещё будут расти с 8 до 11.
Поскольку график угла - неубывающая функция оборотов, то в средних точках, естественно, углы не должны быть больше этого макс значения угла, полученного на макс оборотах с поднятым колесом.
Наверное, степень заряда конденсатора нужно будет как-то экспериментально проверить.
В принципе - да. За 35 град до ВМТ напряжения на обмотке должно хватить. Учитывая, что такой угол будет на высоких оборотах, где сама ЭДС на обмотке в несколько раз выше, чем на низких. Это плюс в нашу пользу.
Но есть и минус - в связи с явлением магнитного гистерезиса, фаза ЭДС на обмотке, с ростом оборотов будет запаздывать. И это при том, что даже на низких оборотах, уже при 60 град до ВМТ, ЭДС равна нулю.
По поводу стенда - помню, видел стенд для снятия характеристик ДВС. ЕМНИП (ох, и давно это было! ) там стоял здоровенный маховик с ленточным тормозом, установленный на крутильных весах. Тормозящий момент зависел от степени затяжки тормозной ленты, и измерялся весами. ПМСМ в качестве тормоза можно использовать автомобильный, а весы заменить динамометрической муфтой.
А еще методика измерения может быть такой:
В карбюраторе установить устройство, дозирующее подъем заслонки (например, набор разрезных втулок, одеваемых на тросик, или опускаемый через крышку винт). Выбрать участок с продолжительным подъемом. И гонять по этому участку при различных УОЗ и положениях ДЗ. Тогда нагрузка на двигатель будет ПМСМ более ровной.
Ушествие Второе. Окончательное.
Плесну ещё немного своей водицы.
Корректор с автоматическим ОУЗ и с взможностью ручной корректировки получился на двух транзисторах. При установке УЗ на оборотах 1200об/м равным штатному 18град. ,на 12000об/м имею +18 = 36град.. Эти величины, при небходимости, можно изменить путём ручной корректироки.
http://ntpo.com/techno/techno2_3/17.shtml
корректор на 2 транзисторах подкупает своей простотой. прибавка растёт от 0 на 1200 об/мин до +18 гр на 12000 об/мин, но вот какой ход характеристи при этом реализовался?
если на низах и на верхах большого влияния от разброса не чувствуется, то на оборотах в области 5000-7000 изменение угла даже на 3 градуса заметно ощущается, извиняюсь, задницей, при резкой открутке газа.
Конечно, можно ездить и так.Даже в этом случае тюнингованный мопед бегает намного лучше, спору нет. Но что-то вот мне захотелось вылизать из этих характеристик всё , что можно.Видимо, для чувства того, что сделано всё, что можно.Хоть это и не формула-1
//Может чего-то не разобрал
Ну, если внимательно перечитать всю ветку, станет очевидно: здесь есть сторонники двух концепций - простой и сложной. Обе они имеют право на внимание.
К тому же наличие процессора, не является признаком сложности. (об этом тоже писалось выше).
Например, простейшие аналоговые схемы (на транзисторах), при расчетах "минусовых" углов, могут давать немалые погрешности (например из-за температурного дрейфа). А стабилизация их параметров с целью уменьшения погрешностей, приведет к усложнению этих схем.
Микропроцессор - это ОДНА деталь, при помощи которой можно получить очень стабильные параметры с фантастически гибкими алгоритмами.
Ушествие Второе. Окончательное.
Змінено: 21.11.2007 р., Leon
к тебе огромная просьба как к обладателю рабочего устройства пажалуста скинь схему этого устройств мне на мыло UaZori@mail.ru
хочу посмотреть как ты его сделал, дабы не изобретать заново свой велосипед! 8)
[url=http://jog.3dn.ru ] http://jog.3dn.ru/banner.gif
Вообще с тобой я в полне согласен. И не только с этим сообщением, а и с твоими предложениями - кажутся вполне реализуемы. С МК я тоже работать умею, хотя очень люблю аналоговую электронику.
Я ж не меньше заинтересован в решении проблемы электронного зажигания. Выложу свою идею создания:
Зависимость УОЗ от частоты вращ. коленвала (или генератора) представить прямой. Осуществить регулировку по фазе не менее 2 точек (для малой и большой частоты) в пределах около 180 град.
Угол опережения считать от вершины (или пересечения нуля) синуса от генератора (от не важно какой обмотки - но не датчика Холла, он менее стабильный по форме). Это позволит подстроить ОУЗ для любого мопеда и условий. В данной схеме можно и без цифровых частей обойтись, и с ними.
Может напишете своё мнение коротко насчёт такой идеи?
Змінено: 21.11.2007 р., Evgenij
Нарисуй пожалуйста. Не совсем понял твою задумку.
Учтено ли, что частота на обмотках в два раза выше, чем частота КВ?
Учтено ли, что фаза синусоиды на обмотках может иметь фазовый сдвиг на высоких оборотах из-за магнитного гистерезиса?
Учтено ли, что амплитуда напряжения на обмотке питания изменяется с частотой, а форма синусоиды на генераторной обмотке, может быть искаженной из-за работы тиристорного регулятора?
Планируется ли учет положения ДЗ? (это один из немногих дополнительных параметров, который можно учитывать широко доступными средствами)
Вроде бы, все изученные мной на данный момент источники утверждают, что в виде прямой можно представить лишь участок от 1000 об/мин до 5...6 тыс. Далее рекомендуется плавное уменьшение крутизны зависимости.
О влиянии положения ДЗ пока не совсем однозначные сведения. Ждем результата исследований Эла.
Ушествие Второе. Окончательное.
вот сюда неплохо заглянуть
http://www.fuoz-26.narod.ru/fuoz_1.5.html
И сюда:
http://www.rcmaster.ru/forum/viewtopic.php?t=139&postdays=0&postorder=asc&start=0
Ушествие Второе. Окончательное.
1) Это просто с помощью триггера делается.
2) Для этого предусмотрены как минимум 2 точки регулирования УОЗ от частоты вала, можно точек больше сделать и соорудить не прямую зависимость.
3) Это не важно (напряжение). Фиксируется момент максимума, или, что скорее всего более выгодно,- переход через нуль (второй переход - отбирается триггером).
4) Для этого вообще, как я полагаю, нужно крепить какой-то датчик перемещения. В предложеной мной идее это отсутствует.
Нарисую диаграмку - выложу. Или более понятно опишу идею.
по диапазону регулировки УОЗ датчика дроссельной заслонки. искал в интернете упоминания .мало что есть
нашёл только, что у автомобильных вакуумных корректоров вклад в дело регулировки УОЗ составляет
порядка 11 градусов
и ещё нашел упоминание о том, что в автомобиле сделано так, что при полностью закрытой заслонке канал, идущий на вакуумник, перекрывается чем-то там,связанным видимо, с этой же заслонкой или с чем-то ещё, так что получается, вакууммник начинает работать при оборотах выше некоторых, больших чем обороты хх
А сколько же у авто тогда общий ОУЗ? Ну не более 20-ти. Тогда это большое влияние.
Вспомнил основное преимущество моей идеи (почему я её взял за основу) - не требуется никаких испытаний. Всё делается и, поскольку предусмотрены большие средсва регулирования - всё проводится на любой машине уже на месте.
Меня сл. вопросы интерисуют:
- импульс какой мощности на катушку зажигания подавать надо?