Показати повідомлення
Начинаем обсуждение способов решить проблему управления Углом Опережения Зажигания (УОЗ).
Ушествие Второе. Окончательное.
Змінено: 05.11.2007 р., VadimCrimea
вот здесь http://www.oka-club.ru/forumnew/printthread.php?Board=dsad&main=35489&type=post
написано следующее. Привожу один к одному. Для размышления.
начало цитаты
***************
На ХХ вакуум-корректор в регулировке УОЗ участия не принимает!
Коллеги!Чтобы опять не возникло путаницы....
Последняя фраза-истинная правда-на ПРАВИЛЬНО отрегулированном ХХ ВК(вакуум-корректор)участия НЕ ДОЛЖЕН ПРИНИМАТЬ!Цитирую карбюраторщика(К) с гар станции(чтобы не употреблять свой подмоченный авторитет):
Движок на ХХ, Карбюратощик сдергивает трубку с ВК-ХХ уменьшается.????Говорит-"что за лажа!!Такого быть не должно!Значит упорным винтом количества обороты завышены-и отверстие забора вакуума не перекрыто дроссельной заслонкой!Ругаясь,уменьшает обороты упорным винтом.Подрегулирует винт качества.Всё это происходит не на слух-а по электронному стендовому тахометру и измерителю СО-СН.
Сдергивает опять трубку-обороты не меняются!
Вот,говорит-теперь правильно!
Дальше-машина на барабанах тормозных.Они не тормозят-пока вхолостую.Смотри-говорит,как изменяется УОЗ при реальной работе.Вот чуть приоткрыли дроссель-отверстие забора вакуума открылось,разрежение во впускном максимальное и в трубке тоже,обороты прибавились и ВК УВЕЛИЧИЛ опережение зажигания до максимума своего хода!И центробежник тоже увеличил-за счет грузиков(но пока немного)УОЗ возрос (по приборам)до 10-12 град.При дальнейшем увеличении оборотов плавным открытием дросселя ВК ничего не регулирует(он уже сработал на полный ход и увеличил УОЗ),плавно увеличивается УОЗ за счет центробехного регулятора(но до определенного предела-грузики на упор встали).
А вот теперь обороты снижаем опять почти до холостых,нагружаем барабаны и резко "тапку в пол"-центробежныйй автомат работает также-увеличивает до упора УОЗ,а ВК за счет резко УМЕНЬШИВШЕГОСЯ разрежения во впускном коллекторе НЕ УВЕЛИЧИВАЕТ ЗА СВОЙ СЧЕТ УОЗ-таким образом "корректирует"возможную детонацию от повышения нагрузки.
Вот какой полный механизм работы этих двух КОРРЕКТОРОВ-вакуумного и центробежного.
Я ведь специально написал,что ВК впроцессе работы под нагрузкой НЕУВЕЛИЧИВАЕТ ДО СВОЕГО ВОЗМОЖНОГО ПРЕДЕЛА УОЗ!Т.е. служит ограничителем увеличения УОЗ.
А не писал,что он просто уменьшает.Это не игра слов-это полное описание процесса!!!!
***************
конец цитаты.
ещё вот нашёл, что отказ вакуумника немного ухудшает динамику и расход топлива и что
"Вообще принчип < работы > регуляторов в трамблере(распределителе зажигания): имеется центробежный и вакумный регулятор. Центробежный регулятор работает при частоте вращения Коленвала(не трамблера) от 500 до 2500 тысяч оборотов, вакумный же срабатывает при 2500 и до 5000 ( данные для классического движка)"
Последняя из цитат ПМСМ небесспорна.

И еще, по-видимому при использовании датчиков разрежения, придется как-то учитывать уже упомянутый эффект Бернулли. (падение статического давления в канале с подвижной средой). То есть, даже при полностью открытой ДЗ, давление в канале впуска будет тем ниже, чем выше обороты.
Думаю поэтому проще будет использовать ДПДЗ.
Ушествие Второе. Окончательное.
//...когда я пришёл у тебя где-то 150 было...
Самое смешное - прозевал свой 1000-й пост!

А хотелось по этому поводу выдать что-нибудь... этакое...
Ушествие Второе. Окончательное.
я вот тоже думаю, что на скорость сгорания непосредственно влияет состав рабочей смеси, а разрежение само по себе является такой же косвенной
причиной этого, как и положение дроссельной заслонки, поэтому думаю, стоит ли заморачиваться с измерением разрежения в впускном тракте, когда проще
учитывать положение заслонки.
Собственно, я так понял, и нагрузка на двигатель влияет на оптимальный угол не сама по себе, а лишь потому, что вынуждает водителя открывать газ побольше.
Может, и правда, ограничиться датчиком ручки газа? вряд ли это будет уступать датчику разрежения?
пока примерно ясно только, что диапазон его действия будет порядка 6-10 градусов.
Больше- вряд ли. ибо и сам-то угол по сравнению с фиксированным у нас поднимается максимум на 15 градусов, а эта вещь его уменьшает, но в результате её действия вряд ли он должен упасть раньше того, который фиксированный, заводской?
хотя, может, и не факт..
а чтоб понять, сколько нужно градусов на положение дроссельной заслонки, опять приходим к необходимости ставить на мотор датчик давления газов в цилиндре , татчик положения 12 гр после вмт и осциллограф.
На Хонда Джорно стоит коммут с опережением. Датчиком служит просто резюк соединенный с дроссельной заслонкой...
Читаємо Правила форуму, не дратуємо адміністратора :)
Вот одна. Обороты/угол опережения относительно штатных 18град.
300/12,6;600/7.2; 660/6.45; 750/4.5; 858/3.11; 1002/2.88; 1200/2.88; 1500/2.7; 1980/3; 3000/4.5; 6000/7.2; 6600/8; 7500/9; 8580/10.19; 10020/11.9; 12000/10.8; 15000/9; 19800/9.99; 30000/9; 60000/10.8.
Не исключаю некоторую неточность.Измерения проводились с помощью генератора импульсов Г5-60
снять бы его характеристику.
или хотя бы присоединить стробоскоп, завести мотор,
измерить угол, затем отсоединить резистор от заслонки, и двигая его ползунок, посмотреть, в каких пределах он меняет УОЗ
вот это было бы хорошо
заодно бы неплохо посмотреть и макс УОЗ на макс оборотах
вот здесь
http://window.edu.ru/window_catalog/files/r18615/AutoMtd5.pdf
описание методик измерения характеристик двигателей
и устройство тормозного стенда
Так я бы все это сделал, да нет его у меня уже

Но если доберусь до такого - то все сделаю...
Читаємо Правила форуму, не дратуємо адміністратора :)
и вот ещё вопрос.по поводу приведённой характеристики. написано "относительно штатных 18 град"
этот коммутатор родной для того скутера или тюнинговый?
я так понимаю, положение датчика коленвала такое же, как во всех скутерах, он не стоит на более раннем, а "пляшет" в обе стороны от имеющегося угла 18 градусов,осуществляя таким образом сдвиг по фазе сигнала датчика как в плюс, так и в минус ?
Змінено: 23.11.2007 р., killer258
Датчик стоит на своём месте. Коммутатпр родной. Ещё повторюсь. Для корректора я использую отрицательный импульс с датчика который у меня появляется на 54градуса раньше чем положительный, предназначеный для коммутатора, это избавляет от перемещения датчика. Корректор подключил и едиш с опережением зажигания, а снял - на штатном зажигании. На всех скутерах наверняка имеется такая возможность.
Я тоже думаю, что на всех скутерах есть такая возможность. Отличается только разнос положительного и отрицат импульсов. у моей хонды это 40 гр, сузуки 31.8 ямаха 61.9, китайцы- около 15 град (очень короткая железка на маховике)
Я тоже использую отрицательный импульс.
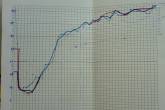
Вот здесь график УОЗ , с которым я езжу.
ниже пунктиром- ваш график для сравнениния.
Судя по вашим цифрам, я малость погорячился и переборщил с задиранием углов опережения. У вас кривая идёт ниже. Я пробовал уменьшать свои углы градусов на 5 ниже и видел, что хуже вроде не становится, но не успел толком проверить, зима началась, снег, лёд..
Хотя, если я поставлю потенциометр на дроссельную заслонку и использую его сигнал для имитации работы вакуумного корректора, то контроллер лишние градусы вычтет, и будет совсем как у вас, или около этого.
Жаль, что у вас в таблице не приведено данных между 3000 и 6000 об/мин. тоже хотелось бы сравнить
Змінено: 23.11.2007 р., killer258
ПМСМ не очень сложно сделать так, чтобы процессор сам высчитал и учел величину разноса импульсов.
Но все же 15град у "китайцев" - уже маловато.
Поэтому все же, склоняюсь к отсчету от штатного угла.
Теоретически, на таких "китайцах" очень просто сделать дискретное управление УОЗ, путем переключения полярности обмотки датчика.
Ушествие Второе. Окончательное.
Змінено: 24.11.2007 р., Leon
в принципе, я думал над этим. процессор действительно может в течениии одного-двух оборотов
измерить отношение периода коленвала к периоду между импульсами и сделать себе самокалибровку
(один раз и навсегда при нажатии спец кнопки с записью в константы в энергонезависимую память,либо делать это при каждом запуске). Это актуально лишь при массовом производстве для всех подряд.
Единственное, что не может процессор сам узнать, так это чему равен штатный угол,поэтому всегда будет предполагать,что он равен 18-20 градусов на любой модели. надеюсь, что это так. Если у кого есть данные по результатам измерения стробоскопом штатного УОЗ по разным моделям скутеров, напишите.
разность 15 град -это измерено у 4 тактных китайцев.
если у отрицат импульса нет достаточного запаса по опережению, то контроллеру придётся на больших оборотах формировать очень малые задержки. А он их не может сделать близкими к нулю, так как на 10 000 оборот/мин пока проц высчитает скорость вала и выберет время задержки из таблицы, он потеряет 100-200 мксек, вал повернётся настолько, что уже недалеко и до положительного импульса, и опережение будет ненамного больше штатного на 10000 об, и это там, где оно должно быть максимальным.
а приклёпывать к маховику самодельные железки с целью удлиннения выступа не хочется.
Видимо, крайний вариант- установка в нужном месте датчика от ВАЗ2108, как тут было у кого-то из нас показано на рисунке.
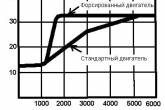
пор поводу смены полярности датчика для короткого китайца. в принципе, может пригодиться, для сильнофорсированных двигателей. у них угол как раз скачком взлетает и дальше идёт не меняясь как на этом рисунке.
физически, чтоб попробовать поменять полярность сигнала датчика, мне пришлось проскоблить перемычку, соединяющуюю второй вывод катушки с землёй.Оба провода провёл в экране до самого коммутатора. Уже одно это улучшило работу мотора, не ясно, в чём, но звук у мотора стал поприятнее на штатном зажигании после этого.
видимо, земляной провод датчика, идя через раму, нахватывал помехи. Хотя потом мне пришла мысль, сменить полярность датчика можено и нехирургическим путём, но тогда потребуется изолирующий трансформатор с отношением 1:1
и вот ещё что откопал
http://technika.multipass.ru/Successes?news=5
http://www.motoizh.ru/modules.php?name=Forums&file=viewtopic&t=8711&postdays=0&postorder=asc&start=30
Змінено: 24.11.2007 р., killer258
я честно говоря не очень понимаю проблемы связанные с "вычислительной" задержкой. какие 100-200 мкс? современные камушки работают на частоте 10-20МГц. это наносекунды... меряем период, делаем необходимые вычисления, загружаем таймер задержки. по приходу сигнала от датчика запускаем таймер, по прерыванию от него выдаём импульс. в реалтайме вообще никаких вычислений! зачем? период вращения колена не может измениться скачком, его постоянная времени достаточно велика чтобы вести необходимые вычисления в фоне. итого имеем основной асинхронный цикл всевозможных вычислений, индикации, обработки нажатий на кнопки итд. и два прерывания, одно измеряет период, второе выдаёт импульс. но, повторяю, никаких вычислений внутри прерываний делать не нужно!
в принципе, можно и отказаться от вычислений. тогда всё будет без задержек работать.
это в моём варианте используются 2 вида вычислений.
первый для перевода периода в обороты (процедура двоичного деления для пик-контроллеров это несколько десятков команд , занимает несколько сотен машинных циклов , от 400 до 900).
Можно не делать этого, просто в качекстве порядкового номера таблицы брать старший байт таймера оборота коленвала, но таблица получается крайне неравномерной, причём в нижней её части, которая практически не используется, соседние пункты таблицы различаются чуть ли не на единицы об/мин, в то время как в конце довольно грубая градация. Можно сдвинуть конечно, ёе вправо, но тогда минимальные обороты таблицы выше становятся, и при заводке стартером могут возникнуть проблемы .
Второй вид вычислений у меня связан с тем, что в таблице записаны углы.Преимущество в том, что для того, чтобы изменить ход графика, достаточно переправить циферки, а не пересчитывать вручную снова все эти микросекунды для каждых оборотов
За это удобство я плачу тем, что проц сам считает микросекунды на любые обороты. Для этого ему приходится делить содержимое таймера на 360 а потом умножать на требуемый угол.Аппаратных блоков деления и умножения в пике нет, а в двоичке всё это делать время и получаются эти 100-200 мксек.
Хотя, не спорю, можно написать прогу на компе, которая просчитает и распечатет времена для всех возможных углов и всех возможных оборотов, и использовать их при изменениии таблиц.
но есть ещё одно соображение, почему я не хочу отказываться от вычислений. У меня есть кнопки, прибавляющие "+5градусов", "- 5 градусов". Их действие имеет силу на любых оборотах, и сводится к добавлению или вычитанию 5 градусов к числу,считанному из таблицы.
А вот если бы в таблице хранились микросекунды для таймера- то попробуй к ним прибавь.. прибавка ведь нужна разная для разных оборотов.
Можно , конечно, сказать, что эти кнопки необязательны.Но зато, кроме них, появляется лёгкаявозможность подключения датчика положения дроссельной заслонки. Ведь вакуумная коррекция как раз и заключается в сдвиге вверх или вниз на то или иное кол-во градусов, я как раз это собираюсь испробовать. пока вот думаю, ка лучше датчик сделать. Резистор и ацп не хочется. будет шторка, перекрывающая ИК-оптопары или датчики холла, несколько штук (ориентировочно 4 хвавтит, мне кажется)
Змінено: 26.11.2007 р., killer258




 увлёкся, что и сам не заметил когда модератором стал
увлёкся, что и сам не заметил когда модератором стал